中国科学技术大学吴思教授与合作者设计了基于可逆光交联高分子的粘合剂,用于水凝胶的可控组装和软体机器人的功能控制。相关研究成果以《Reconfiguring hydrogel assemblies using a photocontrolled metallopolymer adhesive for multiple customized functions》为题,于2024年3月8日在线发表在Nature Chemistry杂志上。
将功能、材质、形状和尺寸不同的水凝胶基元进行粘合是一种制造智能材料和软体机器人的新方法,但是却很难实现。这是因为:1)水凝胶的主要成分是水,不具备固体那样的轮廓分明的表面可供粘合;2)水凝胶发生体积和形状变化时很可能会造成粘合层被破坏;3)一般的粘合剂无法满足智能材料和软体机器人的部件可拆卸、可重构、可编程的要求。
为了克服这些难点,中科大吴思团队利用Ru-S配位键设计了可逆光交联高分子粘合剂,用于可逆粘合水凝胶基元。可逆光交联高分子通过配位交联和界面互穿作用牢固地粘结水凝胶。即使在水凝胶受到热或pH刺激而发生体积和形状变化时,这种粘合作用依旧牢不可破。此外,当被粘水凝胶需要拆卸和重新组装时,可逆光交联高分子能在强光照射下脱粘(图一)。这种可逆光交联与界面互穿相结合的粘合剂设计方法不同于受贻贝启发的粘合剂的设计方法,为设计强而可逆的粘合剂提供了新策略。

吴思团队通过扫描电子显微镜能谱、显微拉曼光谱、荧光关联光谱和理论分析等多种研究手段揭示了粘合剂与被粘水凝胶的界面处存在互穿网络结构,并阐明了界面互穿网络结构是通过高分子链的自由扩散、受限扩散和氢键重组的机制形成的(图二)。
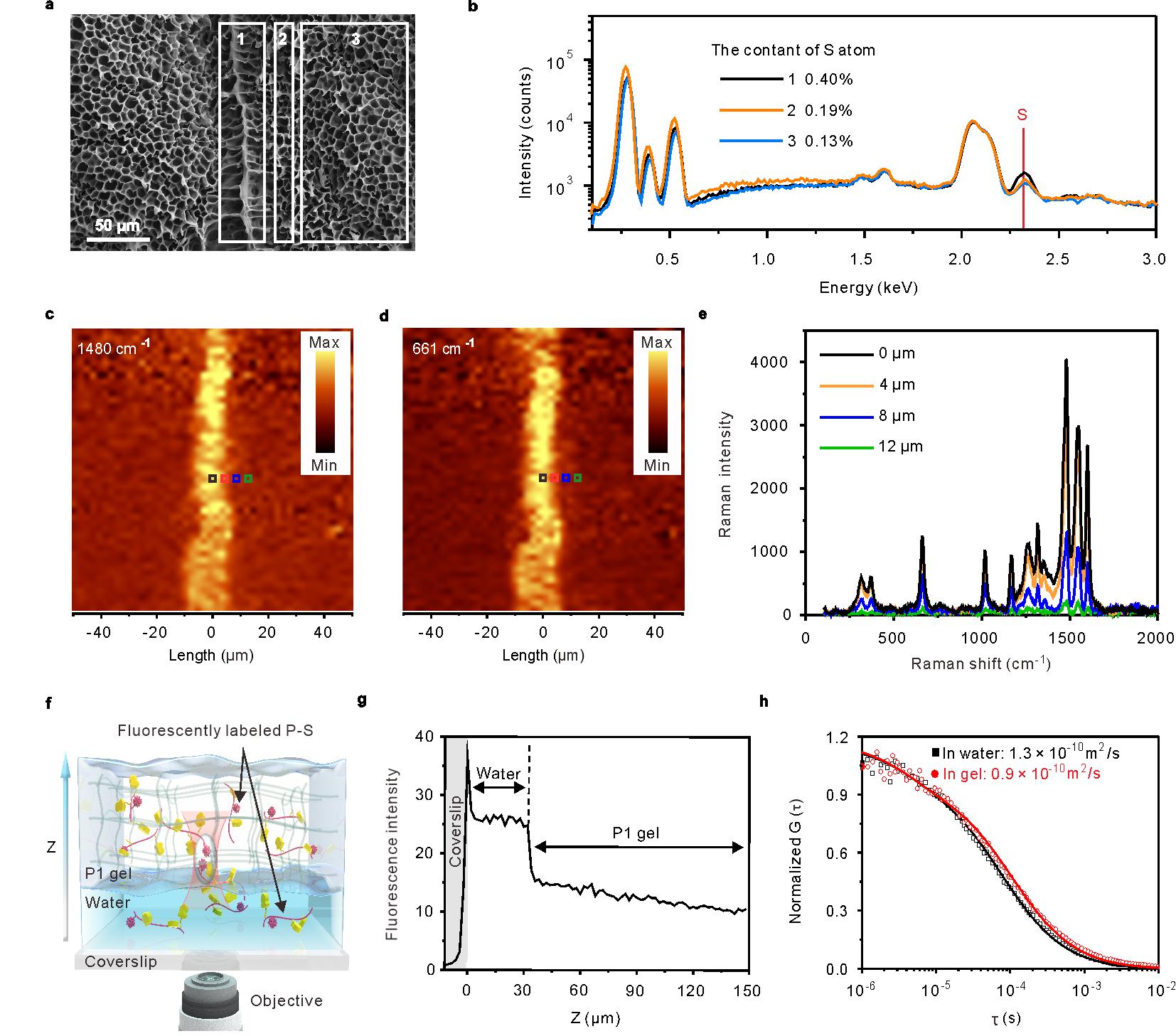
图二:可逆光交联高分子粘合剂与凝胶的界面互穿网络结构的表征及其形成机制
吴思团队利用可逆光交联高分子可逆粘合剂构建了具有定制形状的可重构水凝胶组装体。组装体可以被拆卸,并且被重新组装。水凝胶基元排列不同的组装体在pH和热的刺激下能变形成不同的形状。此外,可逆光交联高分子可逆粘合剂也被用于粘合三种功能不同的水凝胶基元,用于构建软体机器人。软体机器人能通过外界刺激的控制实现迷宫导航(图三)。
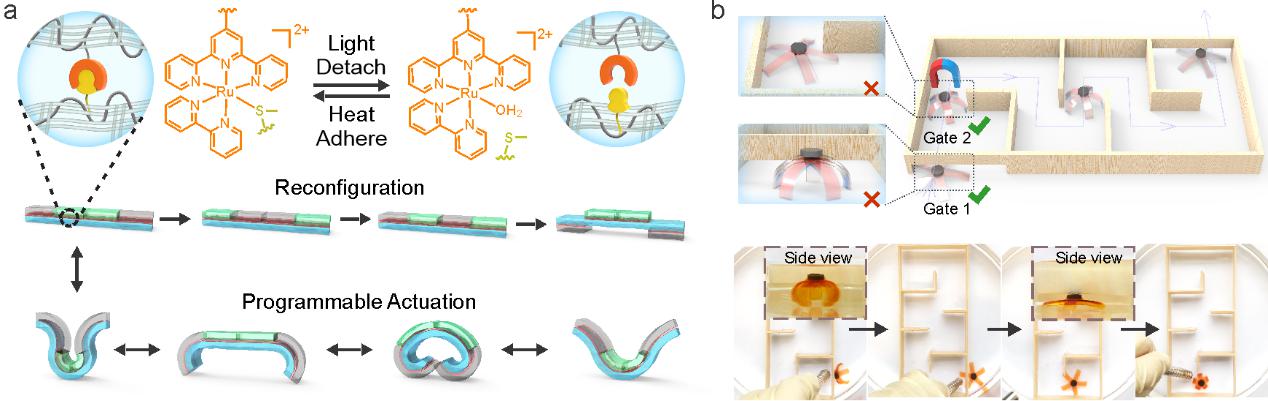
图三:通过可逆光交联高分子粘合剂构建的可重构水凝胶组装体和软体机器人的迷宫导航
该研究工作表明可逆光交联和界面互穿相结合是一种设计强而可逆的粘合剂的新策略,并能应用于构建复杂、异质、响应的水凝胶组装体和软体机器人。利用可逆光交联高分子设计的粘合剂不同于受贻贝启发设计的粘合剂,也不同于已报道的超分子粘合剂。它能适应水凝胶的形状和体积变化,能耐受温度和pH的变化。这一研究为开发新的可逆化学、软物质界面拓扑结构、智能材料和软体机器人提供了新思路。
吴思教授是该论文的唯一通讯作者,中科大为第一单位。该工作得到了国家自然科学基金重点国际(地区)合作研究项目、面上项目、中央高校基本科研业务费专项资金、安徽省自然科学基金、合肥市自然科学基金等项目的资助。在国家自然科学基金重点国际(地区)合作研究项目的资助下,马普高分子所的合作者参与了该研究。
论文链接:https://www.nature.com/articles/s41557-024-01476-2.pdf
(高分子科学与工程系、合肥微尺度物质科学国家研究中心、中科院软物质化学重点实验室、安徽省光电子科学与技术重点实验室)